
- Home
- Summary of Drone Traffic Management System API
About Drone Traffic Management System and API
- Drone Traffic Management System
- Integrated Traffic Management Function
- Information Provision Function
- API Overview
Drone Traffic Management System
In the future, a large number of drones are expected to be used in various fields, including logistics, postal service, security, disaster investigation, inspection, surveying, and agriculture. In a world with heavy drone traffic, we need to acquire the flight plans and flight statuses of all drones and provide integrated drone management support to effectively prevent collisions and other dangers and ensure safe drone operation. We also need to provide weather information and 3D spatial information of terrain and buildings to drone operators.
R&D is underway for the Drone Traffic Management System in the Drones and Robots for Ecologically Sustainable Societies (DRESS) project under these circumstances.
The Drone Traffic Management System aims to allow multiple drones to safely and efficiently share airspace by aggregating the information of applicable controlled airspace and drones flying in that airspace, acquiring spatial and weather information, and providing flight management support to applicable drones based on this information.
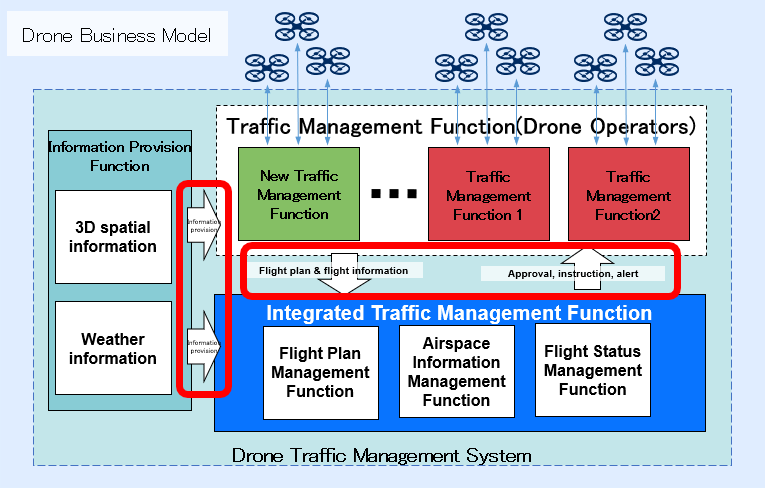
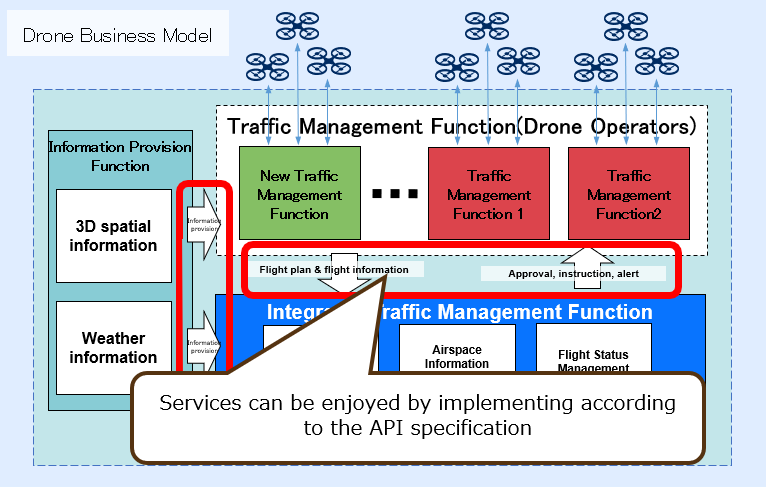
The architecture of the Drone Traffic Management System, which was developed in this project based on the overall design created by JAXA, consists of the Integrated Traffic Management Function, Information Provision Function and Traffic Management Function that connects to these functions.
| Function | Description |
|---|---|
| Integrated Traffic Management Function | The Integrated Traffic Management Function aggregates and manages information related to drones and airspace, shares flight information provided by other Traffic Management Function (connected operators), and provides services that ensure the safety of the entire airspace. This function is also used to make adjustments in the phase of creating flight plans, making sure there is no overlap in the drone flight paths and takeoff/landing fields. The statuses of flying drones are centrally managed. If there is a risk of collision, such as flying too close to other objects, this function provides flight safety information to the Traffic Management Function. |
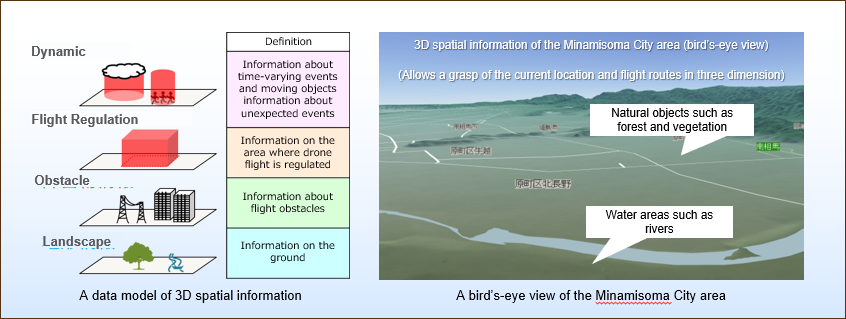
| Information Provision Function | The Information Provision Function provides detailed 3D spatial (geospatial) information and weather information (e.g., wind speed) for the altitude where the drone is flying, both of which are necessary for safe drone operation, to the Traffic Management Function. |
| Traffic Management Function | The Traffic Management Function ensures safe drone operation. This function can also retrieve various information by connecting to the Integrated Traffic Management and Information Provision Functions and provide flight paths and other related information for preventing overlaps with other drone services and systems to the Traffic Management Function. |
Integrated Traffic Management Function
Functions Included in Integrated Traffic Management Function
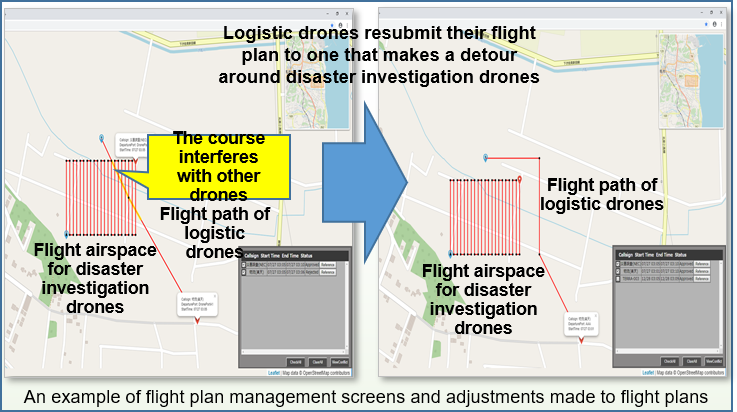
Flight Plan Management Function (Developed by NEC)
This function is used for managing flight plans (flight paths and airspace) that drone operators submit using the Traffic Management Function and making sure there is no overlap in the flight plans, flight paths, airspace, and takeoff/landing field information submitted through other Traffic Management Function. It is also used to check if the weather is suitable for flying drones safely and to look for buildings and terrain, using 3D spatial information, that may interfere with the flights. If there is interference, a request to change the flight plan is submitted to the Traffic Management Function.
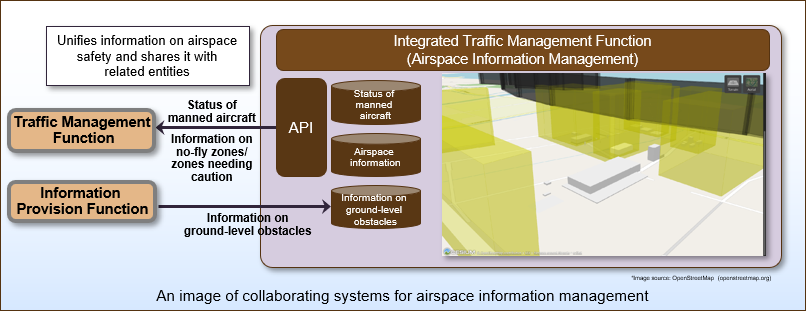
Airspace Information Management Function (Developed by NTT DATA)
This function provides the airspace management functionality necessary for multiple drone operators to collaborate and safely use the same airspace. While it integrates and manages no-fly zones, ground obstacle, and other information provided by other information provision functions, it also provides the information to the Traffic Management Function (drone operator) via API. In addition to this static information, it also has a mechanism for sending unplanned no-fly zone information, which may be set when there is a disaster, to the Traffic Management Function and sharing information with the Traffic Management Function the positions of manned aircrafts that may fly in the same airspace.
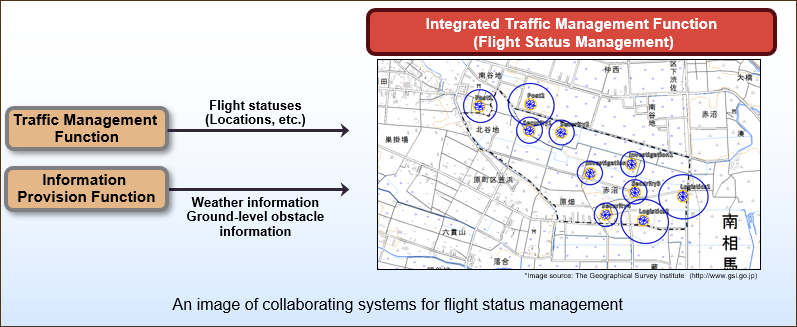
Flight Status Management Function (Developed by Hitachi)
When multiple operators fly their drones at the same time, this function receives real-time flight status information sent from the Traffic Management Function used by each operator, and tracks the positions, speed, and expected flight paths of all drones in flight. It also monitors proximity with other drones, no-fly zones, and ground obstacles, checks differences between flight plans and actual flight paths, and alerts the Traffic Management Function as necessary.
Past Demonstration Tests of Drone Traffic Management System
The demonstration test that used the Drone Traffic Management System was conducted in December 2018 at the Fukushima Robot Test Field.
Click the link below for details.
Flight control system demonstration test for the same airspace and multiple drones was conducted
Information Provision Function
3D spatial information and weather information (Developed by Zenrin, Japan Weather Association)
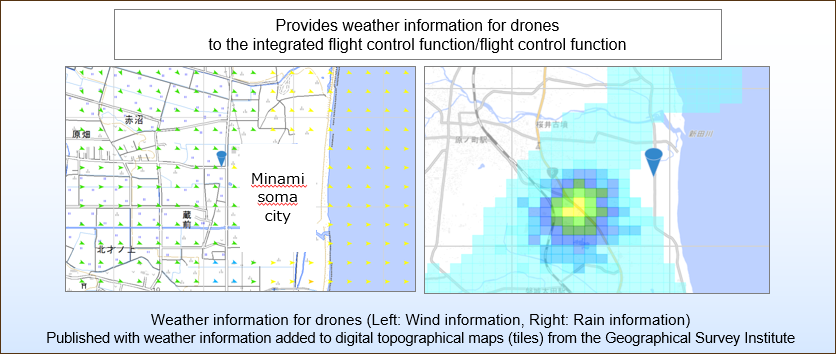
Three-dimensional spatial information was created with accurate height data necessary for creating safe flight paths for drones and detecting proximity to power transmission towers, buildings, and other obstacles in the Minamisoma city and Namie town areas, including the Fukushima Robot Test Field. Data from weather observation equipment at the Fukushima Robot Test Field is used to provide high resolution and frequency wind information tailored for drones and to gather rain information.
This geospatial information is provided via API.
API Overview
The Drone Traffic Management System provides API for the Integrated Traffic Management and Information Provision Functions. The API is provided as part of research and development.
By using the API, even domestic and foreign drone operators who have not participated in the NEDO project will be able to conduct interoperability tests with the drone traffic management system at the Fukushima robot test field.
We are also planning to release test tools for the API in 26 July. Our current plan is to start accepting applications for using and connecting to the Drone Flight Control System API and issuing IDs in 30 August.
API Connection Allows You to ...
◆ Share information related to drone operation
When multiple operators fly their drones in the same airspace for different purposes, each operator needs to share information on their drones with other operators to ensure safety. The Integrated Traffic Management Function provides the services described below. These services can be used via API.
(1) Submit flight plans before flying and check that they do not interfere with the flight plans of other operators.
(2) Share positions of drones while flying.
(3) Receive alerts when there is a dangerous situation and implement countermeasures.
(4) Refer to and utilize airspace information for safe drone operation.
◆ Understanding drone flight conditions (terrain and weather)
To make sure drones can be flown safely, you need to obtain accurate information on the terrain (3D spatial information), which could affect where the drones fly, and weather conditions, including wind and rain, etc.
The Information Provision Function provides 3D spatial information for the area around Fukushima Robot Test Field and weather (wind and rain) information based on drones' flight altitudes. This information can be obtained and used via API.
API Coverage
The API for the Integrated Flight Control Function is provided inside the Fukushima Robot Test Field (Minamisoma City Restoration Industrial Park, 83, Shin-Akanuma, Kaibama-aza, Haramachi, Minamisoma City, Fukushima). The API for the Information Provision Function is provided in the Fukushima Robot Test Field and the surrounding area.